
Choose a robot:
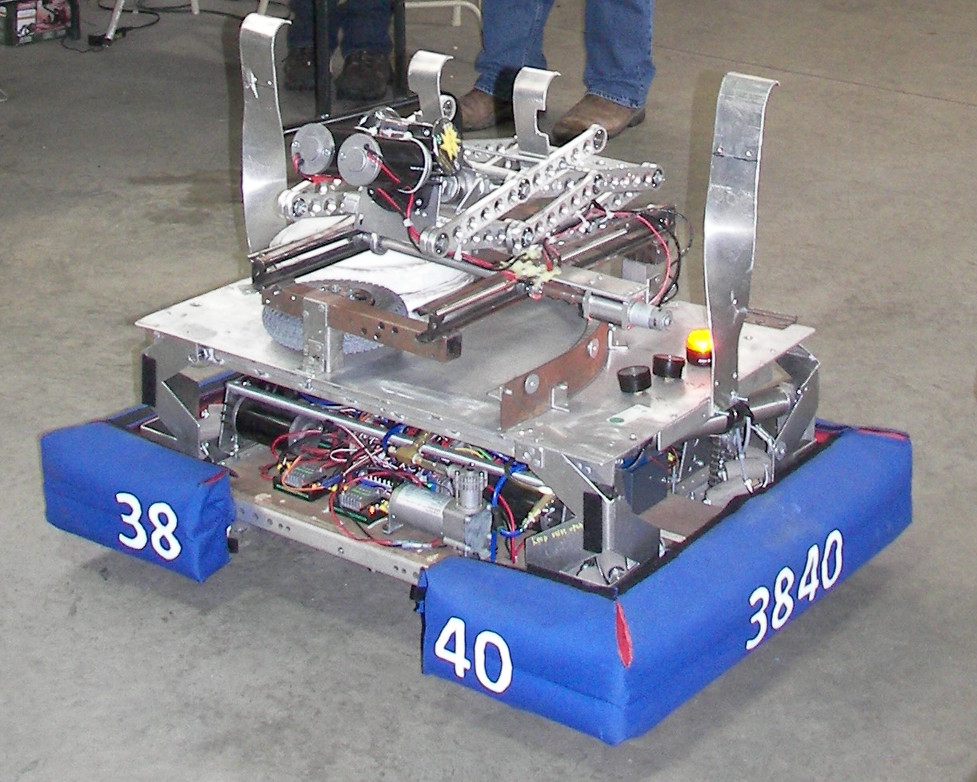
Rivot
Rivot was designed to shoot Frisbees into the high goal and climb for FIRST Ultimate Ascent℠.
Performance:
- Events competed at: Lake superior regional, Duluth MN
- Competed in finals: No
- Placement in qualifications: 25th
Specifications:
General
- Drive train type: Mechanum
- Pneumatics: Yes
- Manipulators: Frisbee launcher, climber (first rung)
- Autonomous: No
- Maximum terrain: Field terrain, carpet
- Removable electrical board: No
Sensors
- Drivetrain Encoders: No
- Camera driving: No
Drive Train
- Traction device: 8" Mechanum wheels
- Gearbox: One CIMple box with 1 CIM per wheel
- Transmission: Chain drive
- Suspension: No
General
- Drive train type: Mechanum
- Pneumatics: Yes
- Manipulators: Frisbee launcher, climber (first rung)
- Autonomous: No
- Maximum terrain: Field terrain, carpet
- Removable electrical board: No
Sensors
- Drivetrain Encoders: No
- Camera driving: No
Drive Train
- Traction device: 8" Mechanum wheels
- Gearbox: One CIMple box with 1 CIM per wheel
- Transmission: Chain drive
- Suspension: No